오늘은 기초 튜토리얼 내용을 정리했습니다. 3D 환경에서의 내비게이션 조작법부터 객체를 생성하고 변형하는 방법 그리고 가장 중요한 물리 엔진을 적용하여 시뮬레이션을 구동하는 방법까지 단계별로 상세하게 정리해 드립니다. 로봇 개발이나 디지털 트윈에 관심이 있는 분들이라면 이 가이드를 통해 아이작 심의 기초를 탄탄하게 다질 수 있을 것입니다.
Isaac Sim 인터페이스 기초 및 뷰포트 조작법
아이작 심을 실행하면 가장 먼저 마주하게 되는 것이 광활한 3D 뷰포트입니다. 이 공간 안에서 자유자재로 움직이고 물체를 관찰하기 위해서는 마우스 조작법을 완벽하게 익혀야 합니다. 먼저 마우스 휠을 위아래로 굴리면 화면을 확대하거나 축소할 수 있습니다. 보고 있는 물체에 더 가까이 다가가거나 전체적인 씬을 조망할 때 자주 사용됩니다.
화면을 상하좌우로 평행하게 이동하는 팬 기능은 마우스 휠 버튼을 누른 상태에서 드래그하면 작동합니다. 원하는 위치로 시점을 이동시키고 싶을 때 유용합니다. 만약 특정 물체를 중심으로 화면을 회전하고 싶다면 키보드의 Alt 키를 누른 상태에서 마우스 왼쪽 버튼을 클릭하고 드래그하면 됩니다. 이렇게 하면 선택한 물체나 화면 중앙을 기준으로 궤도를 그리며 회전하게 되어 물체의 입체적인 형태를 파악하기 좋습니다.
마우스 오른쪽 버튼을 클릭하고 드래그하면 제자리에 서서 고개를 돌리는 것처럼 시점만 변경할 수 있습니다. 마치 1인칭 게임을 하듯이 주변을 둘러볼 때 사용하면 편리합니다. 마지막으로 작업 도중 특정 물체를 화면 중앙에 꽉 차게 보고 싶다면 해당 물체를 선택한 후 키보드의 F 키를 누르면 됩니다. 이 단축키는 복잡한 씬에서 작업 대상을 잃어버렸을 때 매우 유용하게 쓰입니다.
객체 변형 도구 W E R 키와 좌표계의 이해
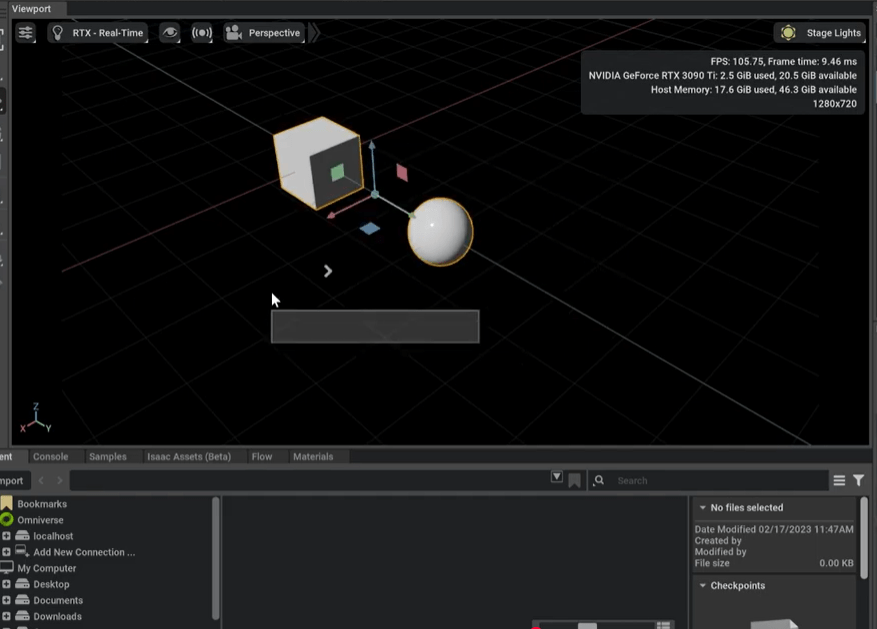
3D 공간에 큐브나 구와 같은 기본 도형을 생성했다면 이제 이 물체들의 위치를 옮기거나 회전시키고 크기를 조절해야 합니다. 아이작 심에서는 다른 3D 툴과 마찬가지로 W E R 단축키를 사용하여 이러한 변형 작업을 수행합니다.
W 키를 누르면 이동 도구가 활성화됩니다. 물체 위에 나타나는 화살표를 잡고 당기면 X축 Y축 Z축 방향으로 물체를 이동시킬 수 있습니다. 이때 중요한 개념이 바로 글로벌 좌표계와 로컬 좌표계의 차이입니다. W 키를 한 번 더 눌러보면 기즈모의 모양이 바뀌는 것을 볼 수 있는데 주황색 불이 들어와 있을 때는 로컬 좌표계를 의미합니다. 로컬 좌표계란 물체가 회전한 상태를 기준으로 축이 정해지는 것을 말합니다. 반대로 글로벌 좌표계는 세상의 절대적인 기준인 동서남북 위아래가 고정된 좌표계입니다. 로봇 팔 끝에 달린 그리퍼를 움직일 때 그리퍼가 바라보는 방향으로 직진해야 한다면 로컬 좌표계를 사용해야 하고 단순히 월드 공간에서 위치를 잡을 때는 글로벌 좌표계가 편합니다.
E 키는 회전 도구입니다. 각 축을 나타내는 원형 띠를 잡고 돌리면 물체를 회전시킬 수 있습니다. R 키는 크기 조절 즉 스케일 도구입니다. 물체의 크기를 전체적으로 키우거나 특정 축 방향으로만 길쭉하게 늘릴 수도 있습니다. 작업을 하다가 실수를 했다면 언제든지 Ctrl Z를 눌러 되돌릴 수 있으며 변형을 마친 후에는 선택을 해제하기 위해 빈 공간을 클릭하거나 ESC 키를 누르면 됩니다.
객체의 계층 구조와 Xform 활용하기
로봇 시뮬레이션에서는 여러 부품이 하나의 덩어리로 움직여야 할 때가 많습니다. 예를 들어 로봇의 몸체가 움직이면 팔과 다리도 같이 따라가야 합니다. 이를 구현하기 위해 아이작 심에서는 부모 자식 관계라는 계층 구조를 사용합니다.
튜토리얼에서는 큐브와 스피어 즉 상자와 구를 각각 만든 후 이 둘을 함께 움직이는 방법을 설명합니다. 이때 유용한 것이 Xform이라는 빈 객체입니다. Create 메뉴에서 Xform을 생성한 후 큐브와 스피어를 이 Xform 밑으로 드래그하여 집어넣으면 그룹이 형성됩니다. 이제 상위 객체인 Xform만 선택해서 움직여도 그 안에 포함된 큐브와 스피어가 동시에 따라 움직이게 됩니다.
이러한 계층 구조는 로봇 모델링의 핵심입니다. 어깨 관절 밑에 팔이 있고 팔 밑에 손목이 있는 식의 구조를 만들 때 이 원리가 그대로 적용됩니다. 스테이지 패널에서 드래그 앤 드롭으로 간단하게 계층을 설정할 수 있으니 다양한 조합을 시도해보며 구조에 익숙해지는 것이 좋습니다.
물리 엔진 적용하기 중력과 충돌 설정
아이작 심이 강력한 이유는 바로 현실과 유사한 물리 시뮬레이션이 가능하기 때문입니다. 단순히 모양만 만드는 것이 아니라 중력에 의해 물체가 떨어지고 부딪히는 현상을 재현할 수 있습니다.
물리 효과를 적용하기 위해서는 먼저 씬에 Physics Scene을 추가해야 합니다. 이것은 이 가상 공간에 물리 법칙을 부여하겠다는 선언과 같습니다. 기본적으로 중력 가속도는 지구와 같은 9.8미터 퍼 세크 제곱으로 설정되어 있으며 방향은 아래쪽인 Z축 방향으로 되어 있습니다.
하지만 Physics Scene만 추가한다고 해서 모든 물체가 바로 떨어지는 것은 아닙니다. 각 물체에도 물리 속성을 부여해야 합니다. 떨어뜨리고 싶은 큐브를 선택한 후 속성 창에서 Add 버튼을 누르고 Physics 항목의 Rigid Body with Collider Preset을 선택합니다. Rigid Body는 물체에 질량과 같은 물리적 성질을 부여하는 것이고 Collider는 충돌 범위를 지정하는 것입니다. 이 두 가지가 설정되어야 비로소 물체는 중력의 영향을 받아 아래로 떨어지고 다른 물체와 부딪혔을 때 통과하지 않고 튕겨 나가게 됩니다.
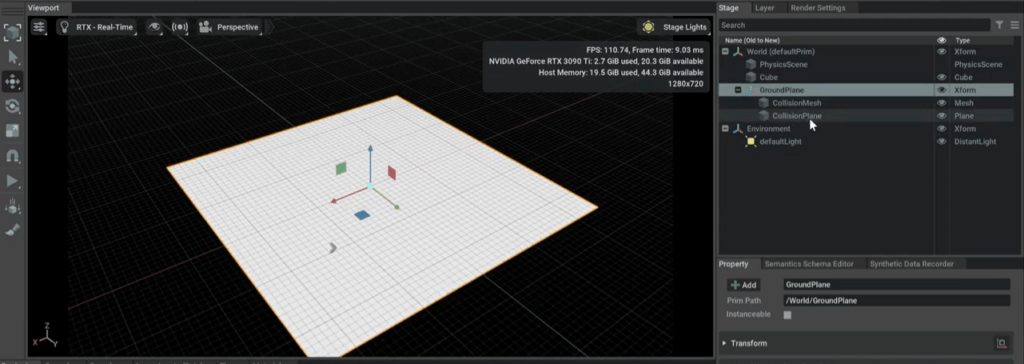
마지막으로 물체가 무한히 떨어지는 것을 방지하기 위해 바닥이 필요합니다. Create 메뉴의 Physics에서 Ground Plane을 생성하면 무한한 평면의 바닥이 만들어집니다. 이제 재생 버튼을 눌러보면 공중에 떠 있던 큐브가 아래로 뚝 떨어져 바닥에 안착하는 모습을 볼 수 있습니다.
시뮬레이션 성능 최적화 CPU와 GPU 물리 처리
시뮬레이션을 구동할 때 컴퓨터의 자원을 어떻게 활용할지도 결정할 수 있습니다. 아이작 심은 엔비디아의 기술력을 바탕으로 GPU 가속을 지원합니다. Physics Scene의 속성을 살펴보면 Broadphase Type을 설정하는 부분이 있습니다.
만약 시뮬레이션에 등장하는 물체의 개수가 적다면 MBP와 같은 CPU 기반의 처리를 사용하는 것이 더 빠를 수 있습니다. 수백 개 이하의 간단한 씬에서는 CPU가 효율적입니다. 하지만 물체가 수천 개 수만 개로 늘어나거나 강화학습과 같이 병렬 처리가 필요한 무거운 작업을 할 때는 GPU Dynamics를 활성화하여 GPU의 강력한 연산 능력을 빌리는 것이 훨씬 유리합니다. 상황에 맞춰 적절한 옵션을 선택하는 것이 시뮬레이션 환경을 만드는 방법입니다.
마치며
이번 글에서는 아이작 심의 가장 기초적인 조작법과 물리 환경 설정 방법에 대해 알아보았습니다. 뷰포트를 자유롭게 돌아다니고 물체를 배치하며 물리 법칙을 적용해 떨어뜨려 보는 과정은 로봇 시뮬레이션의 첫걸음입니다. 이 과정이 익숙해져야 나중에 복잡한 로봇을 불러와서 움직이거나 센서 데이터를 수집하는 등의 고급 작업을 수월하게 진행할 수 있습니다. 처음에는 단축키나 좌표계 개념이 헷갈릴 수 있지만 직접 이것저것 만져보며 익숙해지시기를 권장합니다. 다음 단계에서는 본격적으로 로봇 모델을 불러오거나 관절을 제어하는 방법에 대해 알아보겠습니다.